お問い合わせ
English
ホーム
研究内容
メンバー
研究業績
入進学希望の方へ
アクセス
リンク
研究内容
医療データの統合・高次元化
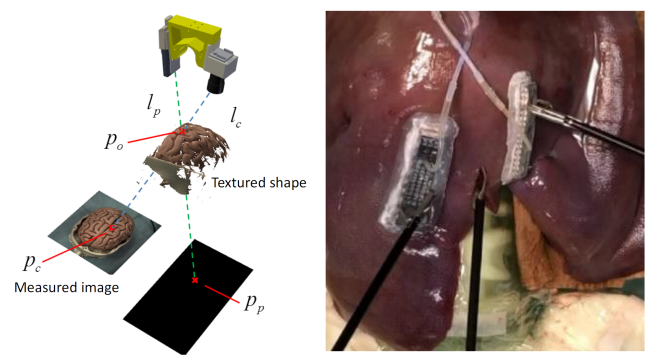
診断・治療支援として、より高次元化された医療データを提供するために、術前・術中に取得される異種医用画像間のレジストレーション(位置合わせ)・統合技術を開発しています。 また、多焦点画像からの形状推定技術を用い、単眼内視鏡画像から臓器表面の3次元形状、色、模様を同時計測する技術を開発しています。
3次元形状計測内視鏡/顕微鏡
Multi-view超音波診断画像計測
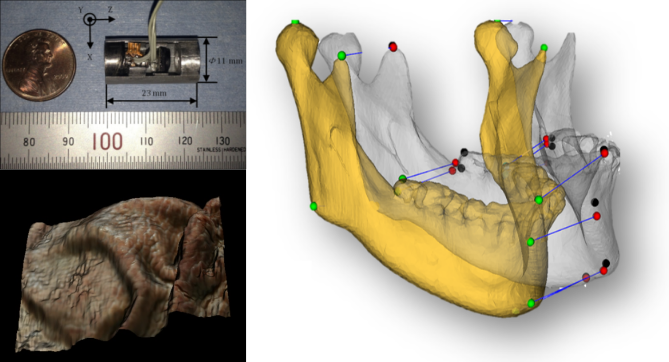
顎関節X線画像からの骨形状特徴点の3次元復元
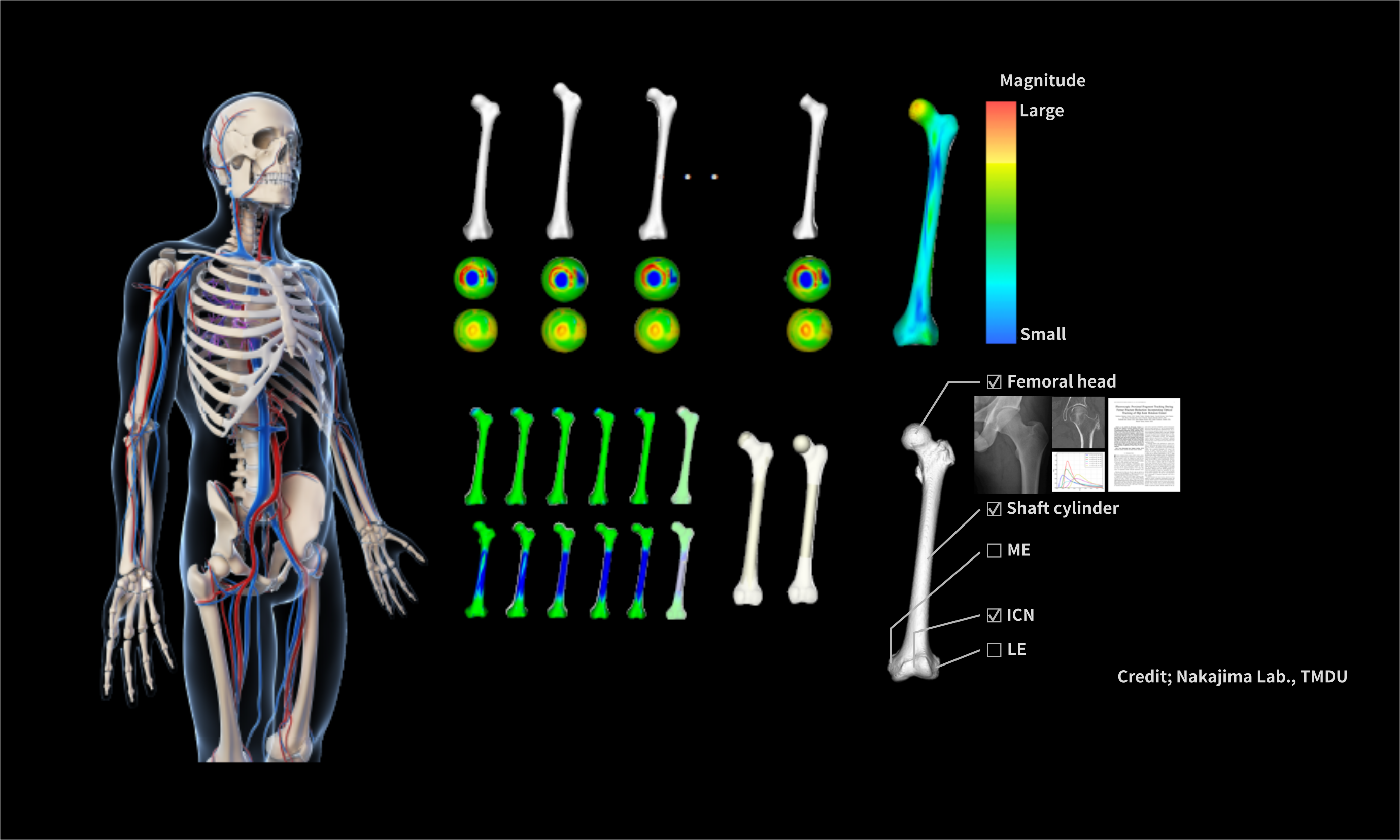
人体構造・生体メカニズムのAI解析
生体計測技術と計算機によるAI解析技術、生体モデリング・シミュレーション技術を統合し、人体構造・生体メカニズムの解析を行っています。 数値解析やAIの活用により、病変部検出、病状解析のためのシステム開発を進めています。
MRI画像からの脳解剖構造セグメンテーション
呼吸状態モニタリング
超音波画像からの神経領域検出
胸腔鏡画像からの肺病変解析
三叉神経の形態解析
自己組織化AIプラットフォームの創成と医療IoT応用
医療現場で診断・治療のために用いられている多種多様な機器から得られる膨大な医療データをAIにより効率的に統合処理する知的なデータベースシステムの構築を目指しています。
多様相AIのネットワークによる医療IoTの実現
手術支援ナビゲーション・デバイスの開発
拡張現実(AR)やプロジェクションマッピング(PM)技術を駆使した手術ナビゲーションシステムや空気圧制御により剛性変化するソフトマテリアルを用いた手術デバイスなど、より安全な手術を遂行を支援する機器を開発しています。
脳神経外科手術支援プロジェクションマッピング
手術ナビゲーションシステムとその精度の理論解析
可変剛性材料の設計と臓器把持デバイスへの実装